리타겟팅(Retargeting)은 한 캐릭터의 애니메이션을 다른 캐릭터의 스켈레탈 구조에 맞게 다시 계산해 적용하는 기술입니다. 서로 다른 신체 비율이나 본 구조를 가진 캐릭터 간에 애니메이션을 공유할 수 있어, 반복적인 애니메이션 작업을 크게 줄일 수 있습니다. 이 문서는 언리얼 5에서의 리타겟팅 워크플로우를 다룹니다.
특징
리타겟팅은 기존 스켈레탈 메시의 계층구조 정보를 기준으로 새로운 스켈레탈 메시의 본 구조를 매칭하는 방식으로 작동합니다.
장점
동작이 반복되는 NPC나 몬스터 제작 시 애니메이션 재사용이 가능하여 개발 효율이 향상됩니다
모션 캡처 데이터나 외부 애셋을 프로젝트의 캐릭터에 빠르게 적용할 수 있습니다
단점
개성이 강한 주인공 캐릭터에는 적합하지 않을 수 있습니다
리타겟팅된 애니메이션은 독립된 애셋으로 복제되어 원본 데이터와 분리됩니다. (UE4 기준 )
애니메이션 수정 시 원본과 리타겟 버전을 각각 수정해야 하므로 유지보수 비용이 증가할 수 있습니다
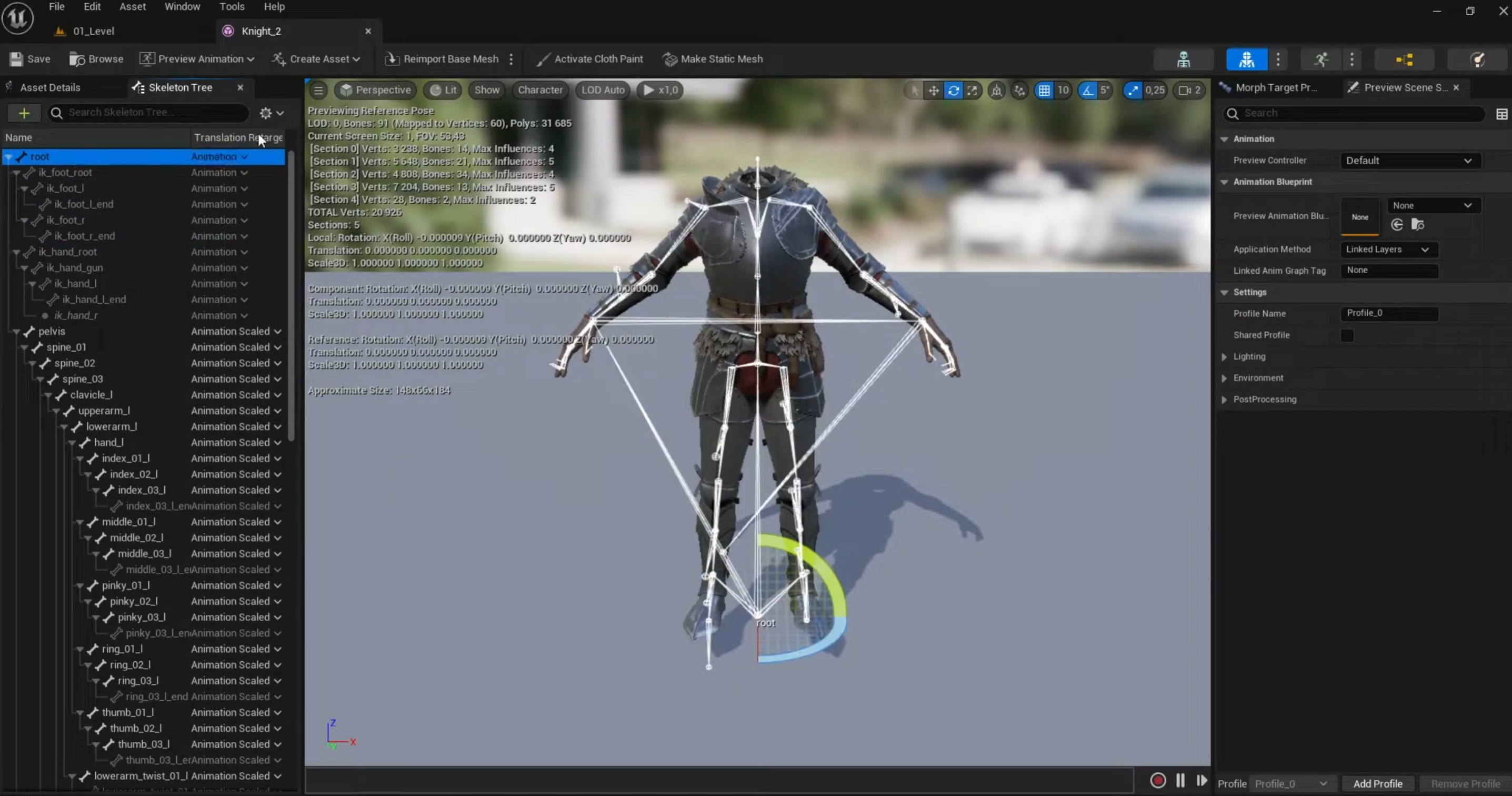
본 트랜슬레이션
리타겟팅 시 본의 위치 정보를 어떻게 처리할지 선택할 수 있습니다.
Animation 본 트랜슬레이션
본의 위치 정보를 원본 애니메이션 데이터에서 그대로 가져옵니다.
Skeleton 본 트랜슬레이션
본의 위치 정보를 타겟 스켈레톤의 바인드 포즈(기본 자세)에서 가져옵니다
Animation Scaled 본 트랜슬레이션
원본 애니메이션의 위치 정보를 타겟 스켈레톤의 비율에 맞게 스케일 조정하여 적용합니다.
Info
Translation 모드는 본의 위치 데이터에만 영향을 주며, 회전 정보는 항상 원본 애니메이션 데이터를 따릅니다.
UE5 Workflow
언리얼 엔진 5부터는 IK Rig와 IK Retargeter 시스템이 도입되어 더욱 정교한 리타겟팅이 가능해졌습니다.
자주 발생하는 문제와 해결책
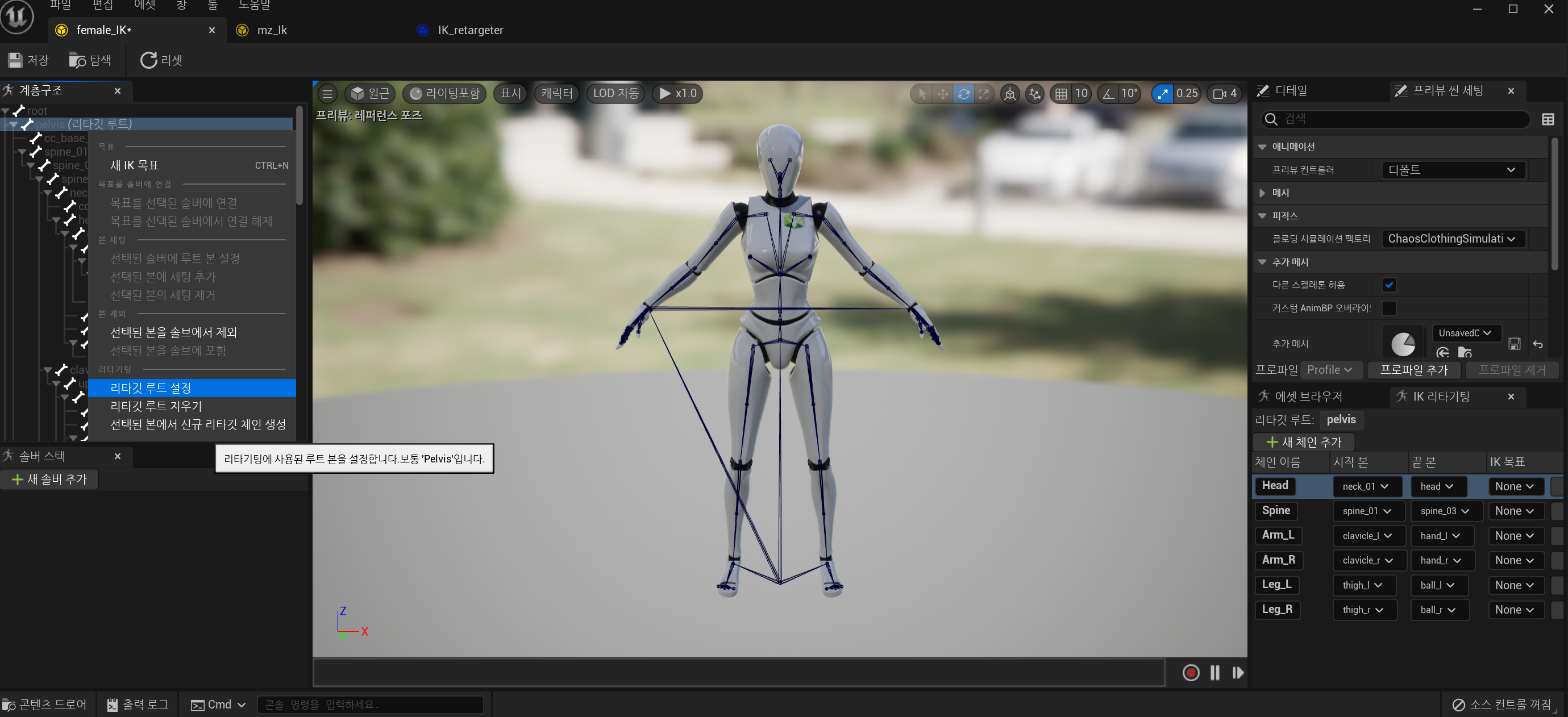
IK Retargeting 작업창에서 Edit Pose가 작동하지 않는 경우
Pelvis(골반) 본에 '리타겟 루트 설정'을 지정했는지 확인
IK Rig 에디터에서 Pelvis 본을 선택 →
Set Retarget Root설정
소스와 타겟의 신체 비율을 일치시키는 방법
완벽한 자동화 솔루션은 없으며, 가장 정확한 방법은 수동으로 포즈를 조정하는 것입니다.
옵션 1. IK 솔버를 이용한 Auto Adjustment
1단계. IK Rig 에디터에서 솔버 추가
- Limb IK Solver
- 새 IK 목표: Hand
- 루트 본 설정: UpperArm
- Full Body IK Solver
- 새 IK 목표: Foot
- 루트 본 설정: Root(또는 Hip)
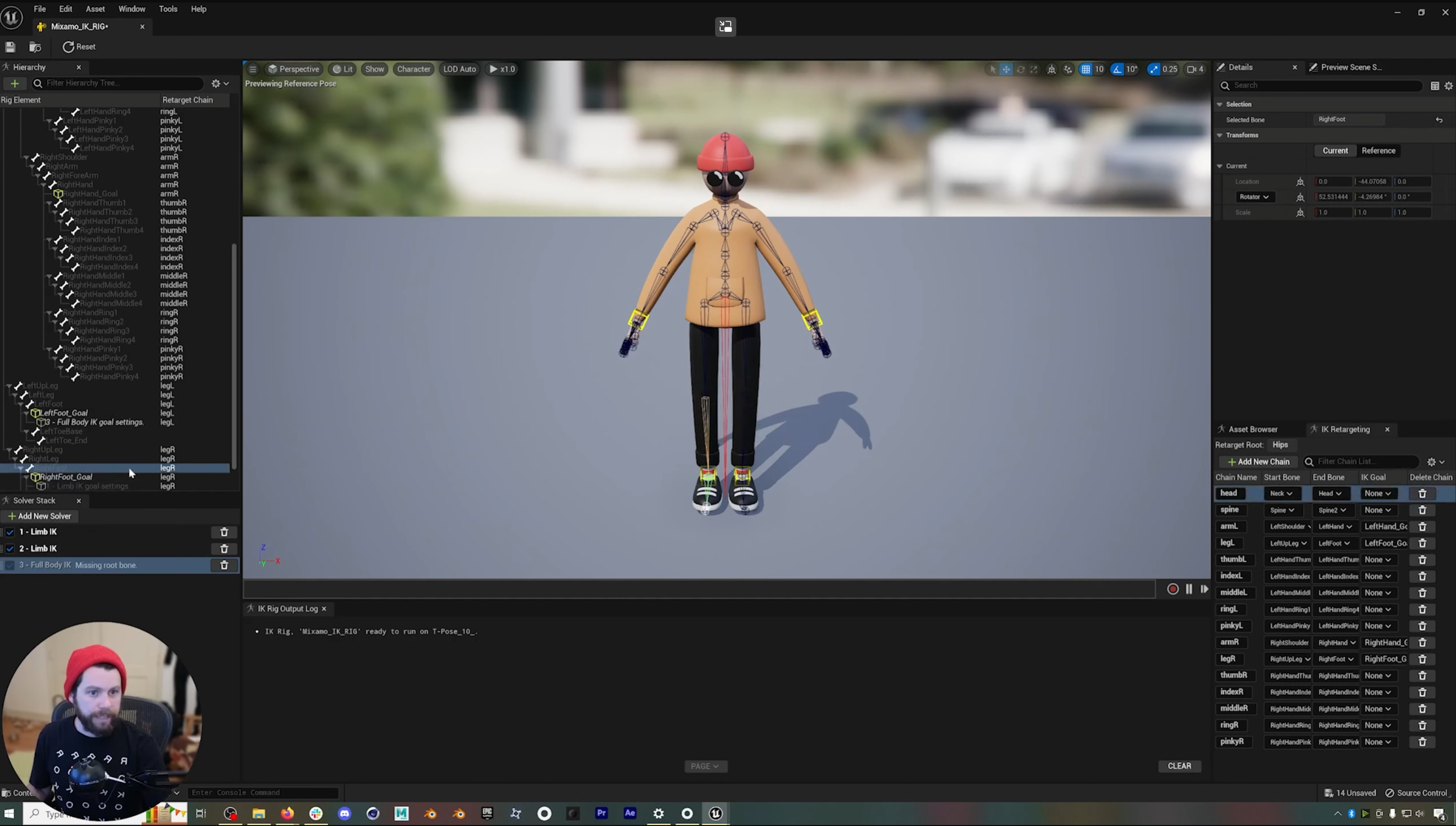
2단계. K Retargeter에서 각 체인의 목표 설정
이를 통해 손과 발의 위치가 자동으로 조정됩니다
옵션2. 더 정밀한 리타겟팅 설정
1단계. Skeletal Mesh 설정
리타겟팅 옵션에서 본마다 트랜슬레이션 모드를 지정할 수 있습니다.
2단계. IK Rig 설정
- Full Body IK Solver 구성
- 새 IK 목표: Hand, Ball(발끝)
- 루트 본: Pelvis
- 추가 설정할 본: Spine, Clavicle, LowerArm, Thigh, Calf
이 단계에선 상체와 하체의 주요 관절들이 올바르게 조정되도록 합니다
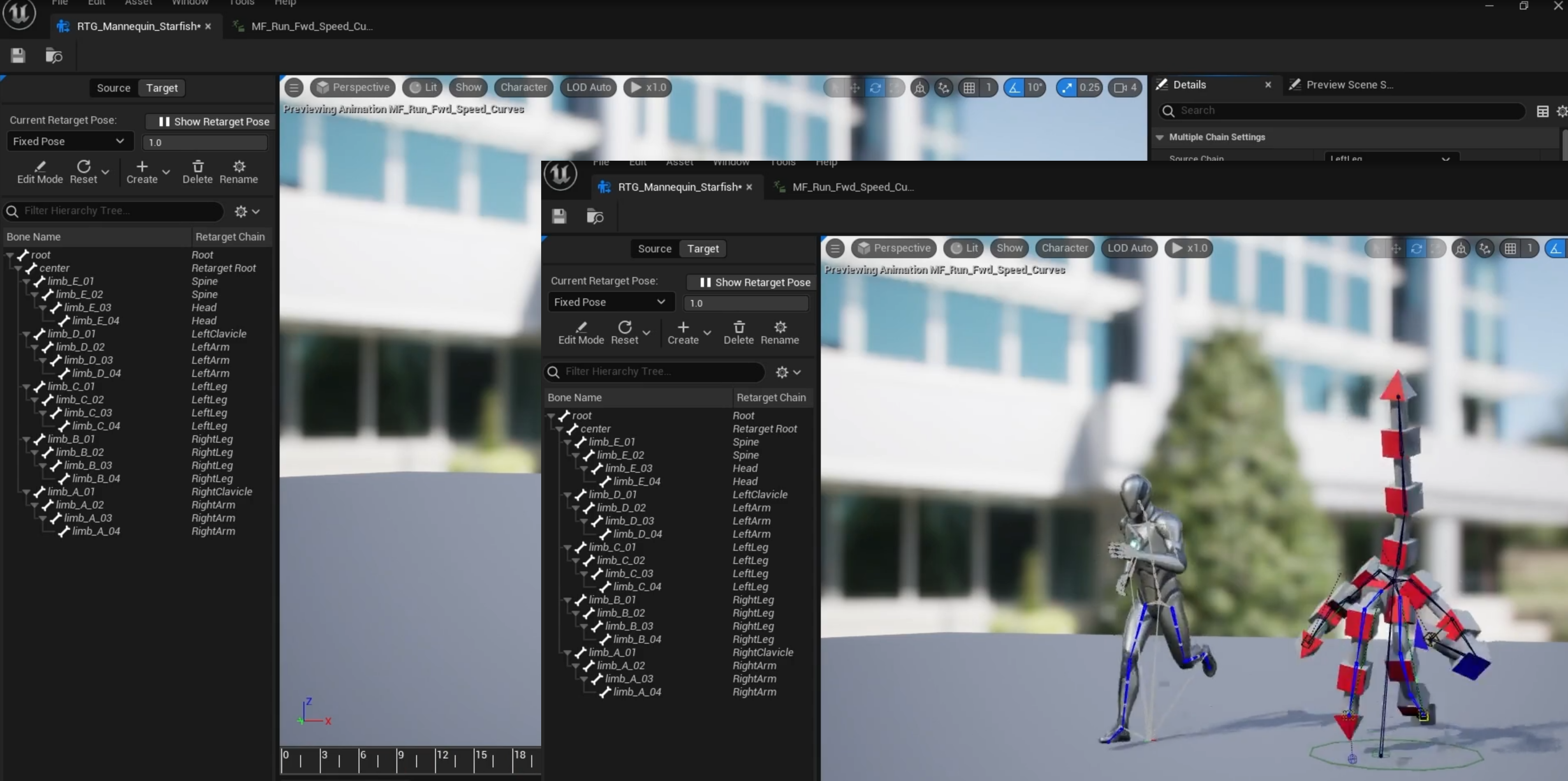
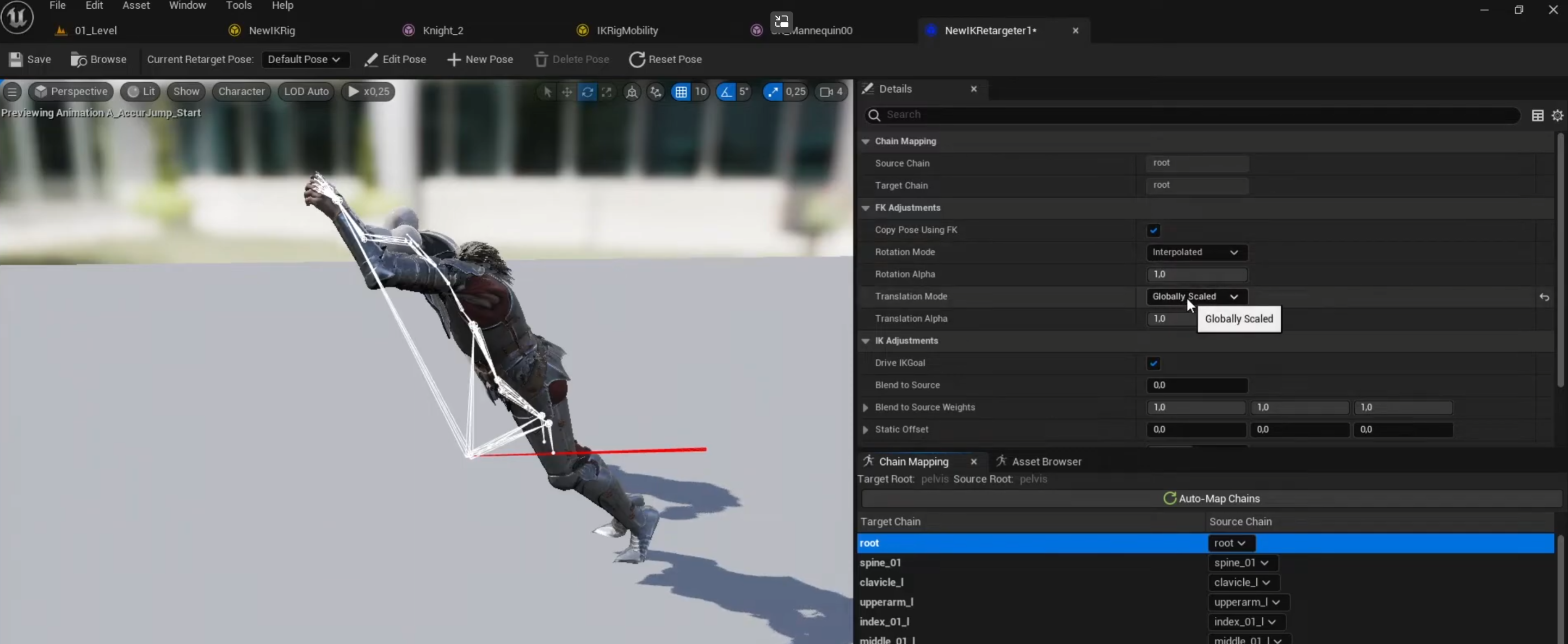
IK Retargeter 설정
Globally Scaled옵션을 활성화하면 소스와 타겟 스켈레톤의 전체 스케일 비율을 고려해 루트 이동값을 조정합니다. 특히 키가 다른 캐릭터에서 Foot Slip을 감소시켜주고 이동 거리 보정하는데 중요합니다.
참고자료